From the "NSW Marine Habitat Mapping Project"
To better manage our oceans we must first understand the extent, distribution and structure of seafloor habitats. Such mapping is essential to improve our understanding of ecosystems dynamics and relationships between biota and habitats. While mapping of shallow water vegetated habitats (i.e. seagrass, mangrove and saltmarsh) has been conducted in estuaries throughout NSW using aerial photography and underwater video surveys, little mapping has targeted seafloor habitats on the continental shelf, particularly in depths greater than around 10 m.
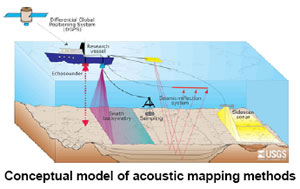
Over recent years there have been significant technological developments that have now made such mapping possible over large areas of the continental shelf. The latest remotely sensed technologies allow measurements of the depth and intensity of the back-scattered energy to estimate the bottom roughness and hardness of the seabed over large areas. Extensive underwater tow video surveys are also often undertaken to ground-truth these interpretations and classify the areas into habitat maps.
There are a number of airborne and vessel based techniques that are currently used to map the bathymetry and seafloor roughness and hardness, and these are often combined with data from existing aerial photos and broadscale depth soundings to provide information on seafloor habitats at different resolutions. Aerial photography
Shallow seafloor habitats have been mapped with aerial photography for several decades, with the maximum depth and accuracy of the maps dependant on a number of factors including water clarity, sun angle and sea state. In NSW, this method has been used to map estuarine habitats (see Estuarine Mapping Factsheet), as well as nearshore shallow rocky reefs along the coast. Aerial photographs can reveal the spatial extent and distribution of reef habitats out to around 10-15 m water depth, and often provide further details on the type and extent of seaweed growing on the reef.
Single beam sounders
Single-beam echosounders have a transducer that generates a single echo pulse at a particular frequency (usually between 30 kHz and 200 kHz) that reflects off the seafloor back to the transducer and allows the estimation of water depth and roughness and hardness. These echosounders operate vertically below the survey vessel to gather a single line of soundings.
They have been used for many decades to generate broadscale bathymetric maps, and most current nautical charts are based on single-beam acoustic data. In recent years they have also been used with new acquisition and classification techniques to estimate the substrate type inferred from the energy and/or shape characteristics of the returning echoes. The choice of echosounder depends on many factors including accuracy requirements, depth of water and resolution. The transducers are generally mounted to the hull of the vessel, but they can also be pole-mounted on small boats for shallow water mapping. Sidescan sonar
Sidescan sonars are one of the ‘swath mapping’ methods commonly used to map large areas of the seafloor. They consists of two transducers both of which produces a thin fan-shaped beam that is concentrated on a line that runs from below the transducer perpendicular to the direction of travel. The maximum range of the signal is determined by the frequency, power and transducer design. After processing, the resulting acoustic backscatter provides seabed.
Sidescan sonars are normally deployed within a towed body that is towed at a fixed height above the seafloor, although it can also be mounted on the hull of a vessel, or on the body of Remotely Operate Vehicles (ROV’s) or Autonomous Underwater Vehicles (AUV’s). Traditional sidescan sonars provide only backscatter data and little information about depth. In recent years interferometric (or bathymetric) sidescan sonars have been developed that provide accurate backscatter and bathymetry across a wide swath. Currently in NSW a bathymetric sidescan sonar is being used to produce high resolution maps of the bathymetry and habitats of the inner and mid-continental shelf. Multibeam sounders
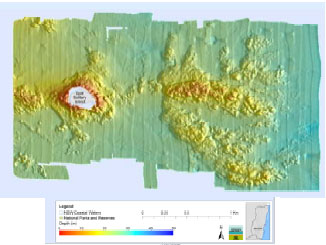
Multibeam or swath sonar systems are currently the most advanced acoustic tool for mapping bathymetry and substrate type of the seafloor. The sonar transducer emits acoustic pulses that are wide perpendicular to the vessel, with the width of the swath mostly related to the depth of the water. The pulses are received back at the transducer and the depth is inferred by measuring the time of the echo returns.
These systems can also collect the reflected energy from the seabed, similar to sidescan sonars, and can resolve small features a few decimetres wide in the seafloor relief in the horizontal plane along with finer bathymetry details. However, resolution is affected by a number of factors including water depth, frequency and amount of compensation for heave, pitch and roll of the vessel. Airborne laser bathymetry
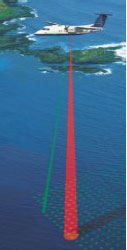
Airborne laser technology (or Light Detection and Ranging - LiDAR) can accurately measure water depth using a series of lasers that penetrate the water column, with part of the signal returning off the bottom. The difference time between surface and bottom returns allows depth to be calculated. The system is highly dependent on water clarity which limits survey depths to shallow coastal areas generally <40 m deep. It is a useful complement to acoustic methods as it can cover areas too shallow to survey from a vessel.
Underwater video imaging
Underwater video is generally used to validate the data classified from the remotely sensed methods in order to produce seabed habitat maps and obtain information on the dominant flora and fauna of seafloor habitats. Digital video methods are now commonly used, with good positional information available from linked GPS units. Video data can be collected using boat-deployed tows and drops, ROV’s, and as diver-held systems. Digital still cameras are also used to obtain fine-scale high resolution imagery.
LiDAR image sourced from the OzCoasts website: www.ozcoasts.org.au. Mapping methods diagram sourced from USGS website: www.woodshole.er.usgs.gov |